
公开数据集

 数据结构 ?
0
数据结构 ?
0
 Data Structure ?
Data Structure ?

* 以上分析是由系统提取分析形成的结果,具体实际数据为准。
README.md
REALISM From sunlight to sensor
Synscapes is created with an end-to-end approach to realism, accurately capturing the effects of everything from illumination by sun and sky, to the scene's geometric and material composition, to the optics, sensor and processing of the camera system. Synscapes was created in collaboration between 7DLabs Inc., and researchers at Link?ping University.
25,000 procedural & unique images
The images in the dataset do not follow a driven path through a single virtual world. Instead, an entirely unique scene was procedurally generated for each of the twenty-five thousand images. As a result, the dataset contains a wide range of variations and unique combinations of features.
Physically based rendering, lights and materials
Synscapes was created using the same physically based rendering techniques that power high-end visual effects in the film industry. Unbiased path tracing tracks the propagation of light using radiometric properties from the sun and the sky, modeling its interaction with surfaces using physically based reflectance models, and ensuring that each image is representative of the real world.
Optical simulation

No optical system is perfect, and the effects of light scattering in a camera's lens can have a large impact on an image's appearance. In particular, when the sun is visible either directly in view, or through bright specular highlights, the image's contrast is significantly reduced. Synscapes models this effect using a long-tail point spread function (PSF).
Sensor simulation and processing

As light strikes a digital sensor, photons are converted into current, and the signal is converted into an image. Synscapes models this process in detail, providing an accurate representation of the the following:
- Motion blur is present in each image, both due to the speed of the ego vehicle where the camera is mounted, as well as that of surrounding vehicles.
- Auto-exposure ensures that each image is well lit, but can also be "tricked" in high contrast scenes, much as a real sensor system could.
- A 10 bit sensor is simulated, with physically plausible shot noise.
- The simulated sensor output is produced by applying a camera response curve, whose result is subsequently quantized to 8 bit PNG-format images.
Multi-dimensional distribution
Synscapes was constructed in such a way that each parameter varies independently, providing a broad distribution across all dimensions of variation. As explored further in our white paper, this property allows for analysis of a neural network's performance by evaluating it selectively on different parts of the dataset, for example the 10% nearest to sunrise or the 5% with the narrowest sidewalk.
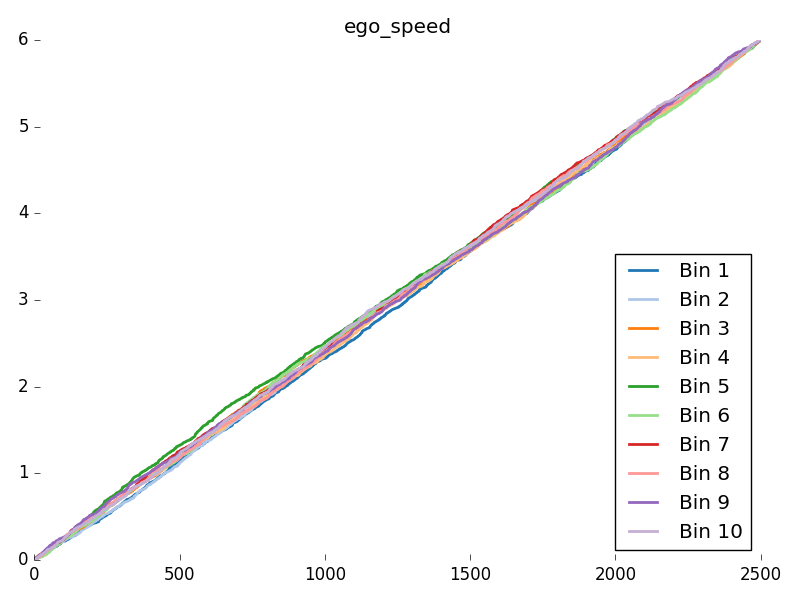
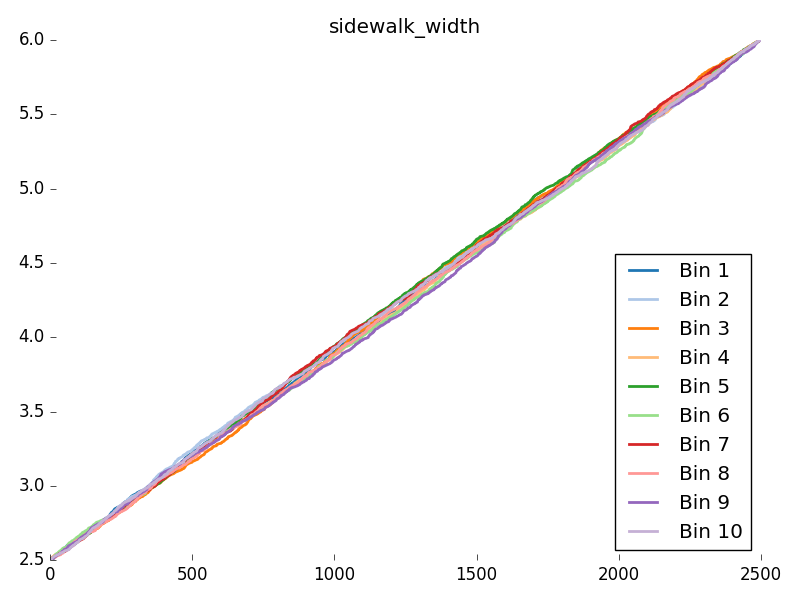
In the graph above, the dataset is segmented into 10 subsets according to the sun_height metadata property. Still, each subset exhibits a consistent distribution across all other dimensions, with ego_speed and sidewalk_width illustrated.


- 分享你的想法
全部内容
数据使用声明:
- 1、该数据来自于互联网数据采集或服务商的提供,本平台为用户提供数据集的展示与浏览。
- 2、本平台仅作为数据集的基本信息展示、包括但不限于图像、文本、视频、音频等文件类型。
- 3、数据集基本信息来自数据原地址或数据提供方提供的信息,如数据集描述中有描述差异,请以数据原地址或服务商原地址为准。
- 1、本站中的所有数据集的版权都归属于原数据发布者或数据提供方所有。
- 1、如您需要转载本站数据,请保留原数据地址及相关版权声明。
- 1、如本站中的部分数据涉及侵权展示,请及时联系本站,我们会安排进行数据下线。
 VIP下载(最低0.24/天)
VIP下载(最低0.24/天) 790浏览
790浏览 35下载
35下载 0点赞
0点赞 收藏
收藏 分享
分享