



 数据结构 ?
260.91G
数据结构 ?
260.91G
 Data Structure ?
Data Structure ?

* 以上分析是由系统提取分析形成的结果,具体实际数据为准。
README.md
What is Argoverse?
- One dataset with 3D tracking annotations for 113 scenes
- One dataset with 324,557 interesting vehicle trajectories extracted from over 1000 driving hours
- Two high-definition (HD) maps with lane centerlines, traffic direction, ground height, and more
- One API to connect the map data with sensor information
Data collection
Where was the data collected?
The data in Argoverse comes from a subset of the area in which Argo AI¡¯s self-driving test vehicles are operating in Miami and Pittsburgh ¡ª two US cities with distinct urban driving challenges and local driving habits. We include recordings of our sensor data, or "log segments," across different seasons, weather conditions, and times of day to provide a broad range of real-world driving scenarios.
Total lane coverage: 204 linear kilometers in Miami and 86 linear kilometers in Pittsburgh.
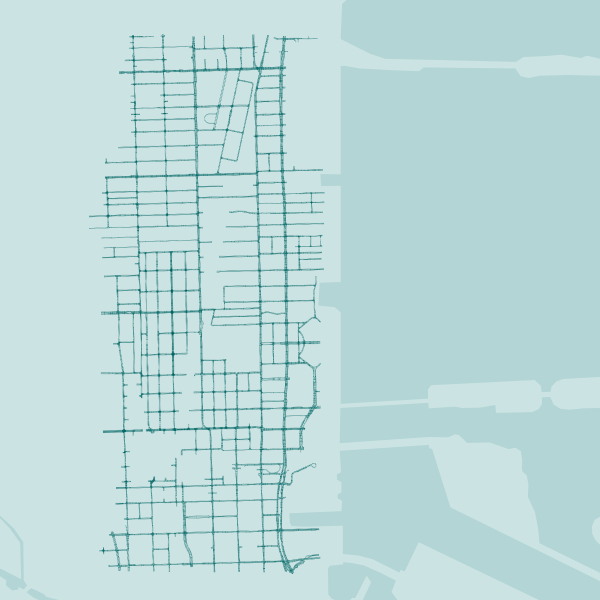
Miami
Beverly Terrace, Edgewater, Town Square
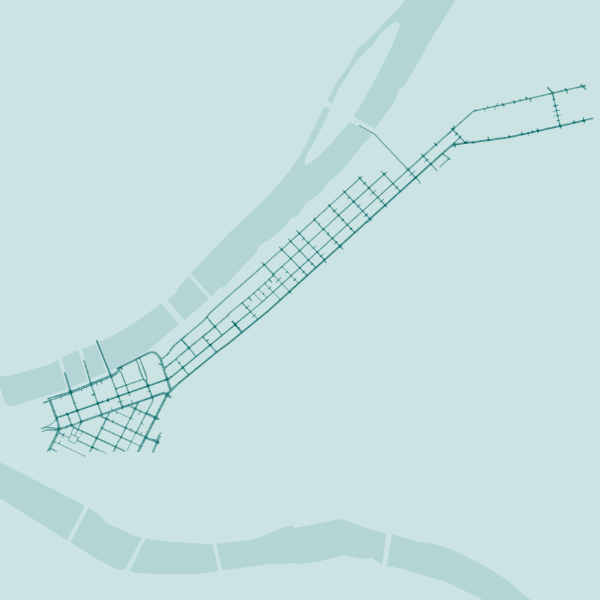
Pittsburgh
Downtown, Strip District, Lower Lawrenceville
How was the data collected?
We collected all of our data using a fleet of identical Ford Fusion Hybrids, fully integrated with Argo AI self-driving technology. We include data from two LiDAR sensors, seven ring cameras and two front-facing stereo cameras. All sensors are roof-mounted:
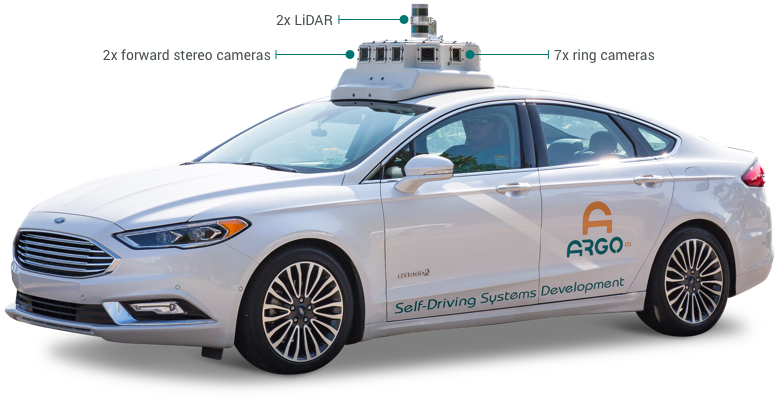
LiDAR
- 2 roof-mounted LiDAR sensors
- Overlapping 40¡ã vertical field of view
- Range of 200m
- On average, our LiDAR sensors produce a point cloud with ~ 107,000 points at 10 Hz
Localization
We use a city-specific coordinate system for vehicle localization. We include 6-DOF localization for each timestamp, from a combination of GPS-based and sensor-based localization methods.
Cameras
- Seven high-resolution ring cameras (1920 x 1200) recording at 30 Hz with a combined 360¡ã field of view
- Two front-view facing stereo cameras (2056 x 2464) sampled at 5 Hz
Calibration
Sensor measurements for each driving session are stored in ¡°logs.¡±v For each log, we provide intrinsic and extrinsic calibration data for LiDAR and all nine cameras.


- 分享你的想法
全部内容
数据使用声明:
- 1、该数据来自于互联网数据采集或服务商的提供,本平台为用户提供数据集的展示与浏览。
- 2、本平台仅作为数据集的基本信息展示、包括但不限于图像、文本、视频、音频等文件类型。
- 3、数据集基本信息来自数据原地址或数据提供方提供的信息,如数据集描述中有描述差异,请以数据原地址或服务商原地址为准。
- 1、本站中的所有数据集的版权都归属于原数据发布者或数据提供方所有。
- 1、如您需要转载本站数据,请保留原数据地址及相关版权声明。
- 1、如本站中的部分数据涉及侵权展示,请及时联系本站,我们会安排进行数据下线。
 VIP下载(最低0.24/天)
VIP下载(最低0.24/天) 366浏览
366浏览 7下载
7下载 0点赞
0点赞 收藏
收藏 分享
分享