
公开数据集

 数据结构 ?
18.12G
数据结构 ?
18.12G
 Data Structure ?
Data Structure ?

* 以上分析是由系统提取分析形成的结果,具体实际数据为准。
README.md
The flow 2015 benchmark consists of 200 training scenes and 200 test scenes (4 color images per scene, saved in loss less png format). Compared to the stereo 2012 and flow 2012 benchmarks, it comprises dynamic scenes for which the ground truth has been established in a semi-automatic process. Our evaluation server computes the percentage of bad pixels averaged over all ground truth pixels of all 200 test images. For this benchmark, we consider a pixel to be correctly estimated if the disparity or flow end-point error is <3px or <5% (for scene flow this criterion needs to be fulfilled for both disparity maps and the flow map). We require that all methods use the same parameter set for all test pairs. Our development kit provides details about the data format as well as MATLAB / C++ utility functions for reading and writing disparity maps and flow fields. More details can be found in Object Scene Flow for Autonomous Vehicles (CVPR 2015).
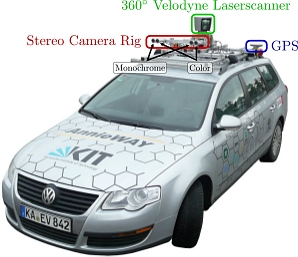
Data Collection
We equipped a standard station wagon with two high-resolution color and grayscale video cameras. Accurate ground truth is provided by a Velodyne laser scanner and a GPS localization system. Our datsets are captured by driving around the mid-size city of Karlsruhe, in rural areas and on highways. Up to 15 cars and 30 pedestrians are visible per image.


- 分享你的想法
全部内容
数据使用声明:
- 1、该数据来自于互联网数据采集或服务商的提供,本平台为用户提供数据集的展示与浏览。
- 2、本平台仅作为数据集的基本信息展示、包括但不限于图像、文本、视频、音频等文件类型。
- 3、数据集基本信息来自数据原地址或数据提供方提供的信息,如数据集描述中有描述差异,请以数据原地址或服务商原地址为准。
- 1、本站中的所有数据集的版权都归属于原数据发布者或数据提供方所有。
- 1、如您需要转载本站数据,请保留原数据地址及相关版权声明。
- 1、如本站中的部分数据涉及侵权展示,请及时联系本站,我们会安排进行数据下线。
 VIP下载(最低0.24/天)
VIP下载(最低0.24/天) 692浏览
692浏览 1下载
1下载 0点赞
0点赞 收藏
收藏 分享
分享