



 数据结构 ?
164.79G
数据结构 ?
164.79G
 Data Structure ?
Data Structure ?

* 以上分析是由系统提取分析形成的结果,具体实际数据为准。
README.md
The odometry benchmark consists of 22 stereo sequences, saved in loss less png format: We provide 11 sequences (00-10) with ground truth trajectories for training and 11 sequences (11-21) without ground truth for evaluation. For this benchmark you may provide results using monocular or stereo visual odometry, laser-based SLAM or algorithms that combine visual and LIDAR information.
Data Collection
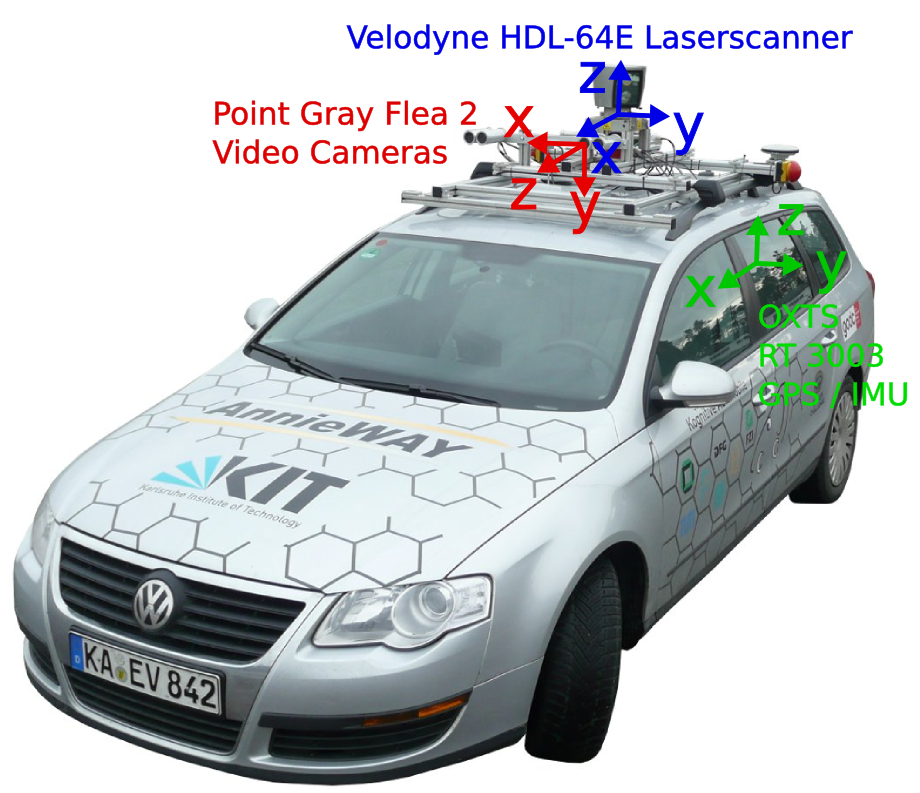
Our recording platform is a Volkswagen Passat B6, which has been modified with actuators for the pedals (acceleration and brake) and the steering wheel. The data is recorded using an eight core i7 computer equipped with a RAID system, running Ubuntu Linux and a real-time database. We use the following sensors:
- 1 Inertial Navigation System (GPS/IMU): OXTS RT 3003
- 1 Laserscanner: Velodyne HDL-64E
- 2 Grayscale cameras, 1.4 Megapixels: Point Grey Flea 2 (FL2-14S3M-C)
- 2 Color cameras, 1.4 Megapixels: Point Grey Flea 2 (FL2-14S3C-C)
- 4 Varifocal lenses, 4-8 mm: Edmund Optics NT59-917
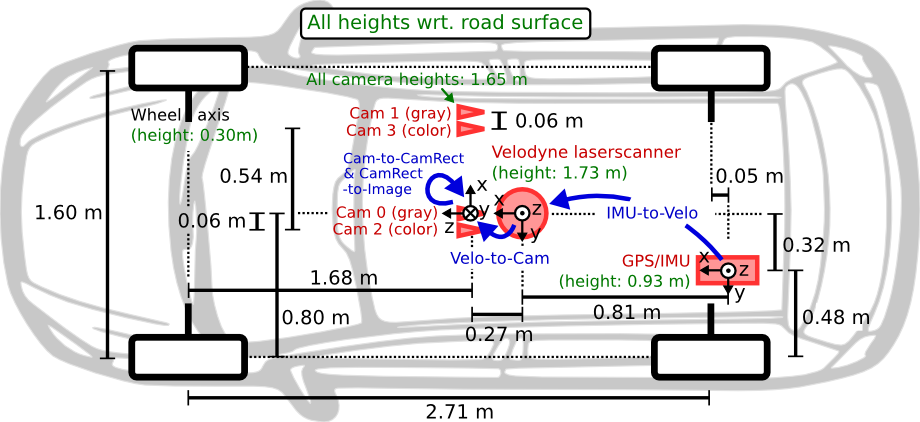
The laser scanner spins at 10 frames per second, capturing approximately 100k points per cycle. The vertical resolution of the laser scanner is 64. The cameras are mounted approximately level with the ground plane. The camera images are cropped to a size of 1382 x 512 pixels using libdc's format 7 mode. After rectification, the images get slightly smaller. The cameras are triggered at 10 frames per second by the laser scanner (when facing forward) with shutter time adjusted dynamically (maximum shutter time: 2 ms). Our sensor setup with respect to the vehicle is illustrated in the following figure. Note that more information on calibration parameters is given in the calibration files and the development kit (see raw data section).


- 分享你的想法
全部内容
数据使用声明:
- 1、该数据来自于互联网数据采集或服务商的提供,本平台为用户提供数据集的展示与浏览。
- 2、本平台仅作为数据集的基本信息展示、包括但不限于图像、文本、视频、音频等文件类型。
- 3、数据集基本信息来自数据原地址或数据提供方提供的信息,如数据集描述中有描述差异,请以数据原地址或服务商原地址为准。
- 1、本站中的所有数据集的版权都归属于原数据发布者或数据提供方所有。
- 1、如您需要转载本站数据,请保留原数据地址及相关版权声明。
- 1、如本站中的部分数据涉及侵权展示,请及时联系本站,我们会安排进行数据下线。
 VIP下载(最低0.24/天)
VIP下载(最低0.24/天) 422浏览
422浏览 1下载
1下载 0点赞
0点赞 收藏
收藏 分享
分享