


使用Disentangling形式的损失函数回归2D和3D目标框
 12-11 19:38
12-11 19:38
 TAG:
TAG:
本文介绍一篇 ICCV 2019 的论文『Disentangling Monocular 3D Object Detection』。详细信息如下:

0.动机
相比于较为成熟的2D目标检测技术,3D目标检测尚处于发展之中。而在3D目标检测领域,基于单目相机的方法又远远落后于基于多传感器融合的方法。 使用单目相机做3D目标检测是个“ill-posed”问题,因为三维场景到二维图像的映射过程引入了模糊性。
当前使用神经网络解决单目相机3D检测问题大多存在两个特性:1.需要对3D目标框的长、宽、高、深度、角度、位置进行编码,这些属性的单位、范围不统一,若直接使用它们构造损失函数,一定程度上会影响网络的收敛过程;2.首先训练2D目标检测器,然后将3D目标检测模块集成进来,这种分阶段训练的方式并不是最优的。
基于上述问题,作者将3D目标框的属性参数在损失函数层面上分组,解耦它们之间的依赖关系,解决了这些属性在单位、范围上的不一致问题,减轻了网络收敛难度,使得2D目标检测网络和3D目标检测网络能够一起训练,达到端到端训练的目的。
针对2D目标检测任务,作者还引入了一种基于sIOU(signed Intersection-over-Union)的损失函数提高性能;针对3D目标检测任务,作者引入了一个损失项用于得到3D目标框的检测置信度。
1.网络结构
基于单目相机的3D检测任务,即输入单张RGB图片,输出目标在相机坐标系下的3D框属性,如下图所示:

作者提出的MonoDIS网络可以分为Backbone、2D检测器和3D检测器3部分,下面分别介绍。
1.1 Backbone
Backbone的结构如下图所示:
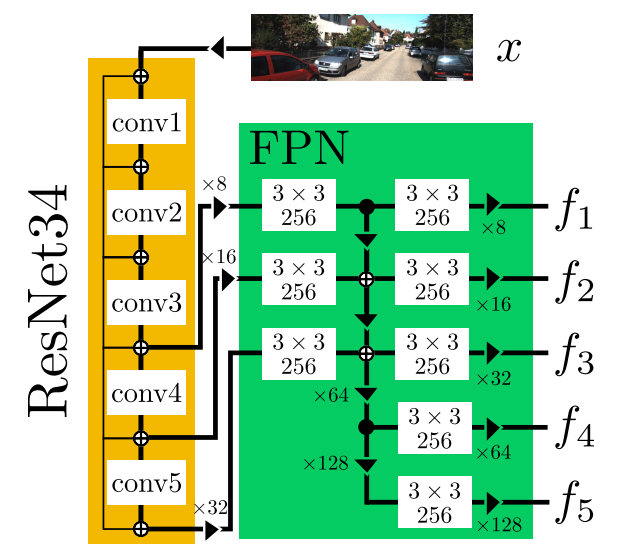
由上图可以看出,Backbone由ResNet34和FPN(Feature Pyramid Network)组成。 在ResNet34中,使用InPlaceABN()+LeakyReLU替代BatchNorm+ReLU结构,其中LeakyReLU的negative
slope为0.01。这么做的目的是在不影响网络性能的前提下降低GPU显存的消耗,从而可以尝试较大的batch
size或者较大的输入图片分辨率。 Backbone的输入为RGB图像,输出为5种尺度的特征,分别记作
。
1.2 2D目标检测
与RetinaNet中的检测部分类似,在Backbone输出的每个后面接一个2D检测模块,2D检测模块的结构如下图所示:
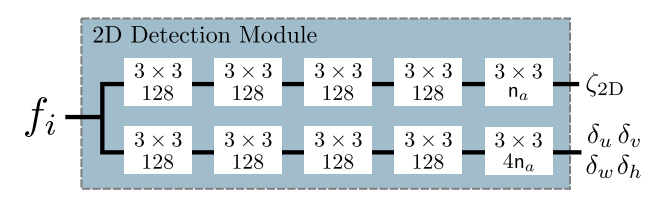
每个后面所连接的2D目标检测模块的网络结构完全相同,除了最后一个卷积操作以外,每个卷积操作的后面同样使用了
而不是普通的BatchNorm。 2D目标检测模块的输入为
,对于每个输入
,2D目标检测模块会输出
个anchor的若干个属性信息,其中
表示grid尺寸,
表示grid中的每个cell预定义的anchor数量。
对于每个anchor输出5个信息,记作,使用这些信息构造预测框的属性:
表示2D预测框的置信度,记作
;
表示预测框的中心点坐标,记作
,
表示这个anchor对应的cell在图像坐标系下的坐标,
表示这个anchor的预定义尺寸;
表示预测框的尺寸,记作
。
取网络输出的置信度高于0.05且置信度排名前5000的预测框,进行IoU阈值为0.5的NMS操作,最后选取置信度最高的100个预测框作为2D检测结果。
损失函数
Focal Loss
使用focal loss损失函数训练分类分支,对于grid中给定cell的某个anchor,定义目标置信度为,预测到的置信度为
,损失函数表示如下:
上式中的和
是超参数,且
,
。
目标置信度取决于anchor和ground-truth,若anchor和gound-truth对应框的IoU超过给定阈值
,则令目标置信度
。
Detection Loss
若存在两个框和
,将sIoU定义为:
令表示框的四个元素中前两个元素为第一个坐标,后两个元素为第二个坐标。当第一个坐标在第二个坐标的左上角时,的值为框的面积;否则
的值为框的面积的相反数。
举例如下:
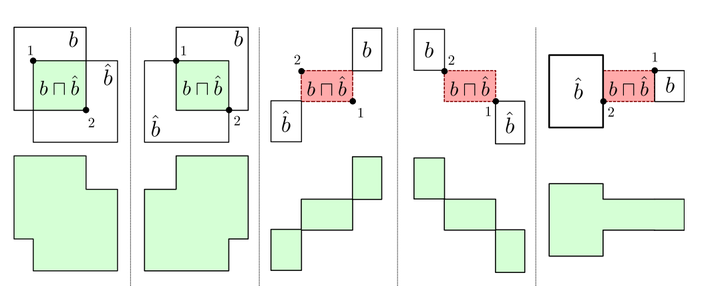
在前两个图中,根据上述公式得到的框,第一个坐标在第二个坐标的左上角,
为正值,即
和
的相交面积。 在后三个图中,根据上述公式得到的
框,第一个坐标不在第二个坐标的左上角,
为负值。
上图中第一行带颜色的部分为sIoU公式中的分子部分,绿色代表正值,红色代表负值;第二行代表sIoU公式中的分母部分。
对于gound-truth框和预测框
,定义检测损失函数为:
1.3 3D目标检测
对于网络最终输出的每个2D框,都要预测一个与之对应的3D框。对于每个2D框,使用ROIAlign从FPN中抽取特征,特征尺寸为14×14。FPN中共有5个尺度的特征,尺寸为
的2D预测框使用FPN中的
,
的选取策略如下:
3D目标检测模块的结构如下图所示:
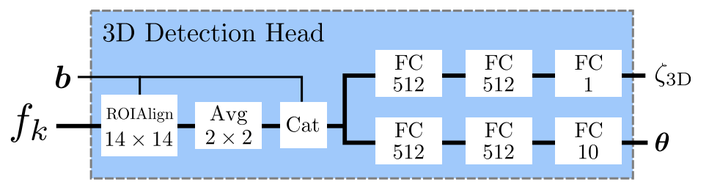
上图中FC代表全连接层,除了最右侧的2个FC层外,其余FC层后面均带有iABN操作。 3D目标检测模块的输入为backbone输出的以及2D目标检测模块输出的2D预测框
,3D目标检测模块的输出为
和
,使用这些信息构造3D预测框的属性:
表示给定2D预测框的条件下3D预测框的置信度;
表示3D预测框中心点的深度,其中
和
是预定义值;
表示3D预测框中心点在图像平面上的坐标;
表示3D预测框的尺寸,即宽、高、长,其中
是预定义值;
表示allocentric的四元数,表示3D预测框的姿态信息。
根据和
可以得到3D目标框的置信度:
置信度大于阈值即认为存在3D目标,对于3D检测,作者并没有使用NMS。
3D目标框回归损失
若相机内参已知,根据上文提到的、
、
、
可以得到3D预测框的8个顶点。
设相机内参为
根据透视变换的原理,可以根据网络输出的3D目标框中心点的深度、3D目标框中心点在图像平面上的投影
,得到3D目标框中心点在相机坐标系中的位置
再根据四元数、3D目标框的宽高长
,可以得到3D目标框的8个顶点在相机坐标系中坐标:
上式中矩阵是由
组成的对角矩阵,
,
是对应于
的旋转矩阵。
综上所述,根据3D目标检测模块输出的,可以求得3D目标框的8个顶点,记作
。
令表示相机坐标系下3D目标的ground truth。构造3D目标框回归损失函数
上式中表示参数为
的Huber损失。
3D目标框置信度损失函数
令,其中
为温度系数,使用交叉熵损失构造3D目标框的置信度损失函数(式中省略了下标)
2.Disentangling形式的Loss
2.1 Disentangling的原理
将Disentangling Loss应用于2D目标框和3D目标框的回归损失中,目的是将多组参数对于损失函数的贡献隔离开,同时保留这些参数的原始含义,利于网络训练时的优化过程。 在2D目标框的回归损失中,包含用于确定目标框的2组参数,一组用于确定目标框的长和宽;另外一组用于确定目标框的中心点位置。在3D目标框的回归损失中,包含用于确定目标框的4组参数,它们分别是与深度有关的参数、与3D目标框中心在图像平面投影有关的参数、与旋转角度有关的参数和与目标长宽高有关的参数。
令表示第
组参数,
表示除第
组以外的其他参数。若使用
表示从网络输出的参数到目标框的映射过程:即对于2D目标检测,
表示从网络输出的
到目标框的映射过程;对于3D目标检测,
表示从网络输出的
到目标框的映射过程。
令表示网络输出的用于估计目标框的参数,令
表示根据ground truth利用
的反过程求出的参数,即
,则可以构造如下损失函数:
上式中的表示ground truth,
表示利用网络输出的第
组参数
和根据ground truth推出的除第
组以外的参数
得到的目标框。上式仅仅是针对网络输出的第
组参数构造的损失函数。对网络输出的共
组参数构造损失函数,表示如下:
在2D目标检测中k=2;在3D目标检测中k=4。
简而言之,在构造每个损失函数时,只使用一部分网络输出的参数,其余的参数从ground truth中利用得到。在实验过程中,作者在构造2D目标回归和3D目标回归的损失函数时均用到了Disentangling Loss。
2.2 Disentangling Loss的优势
为了形象地展示出Disentangling Loss的优势,作者做了一个实验。作者分别使用原始的以及
的Disentangling Loss形式,训练网络完成KITTI3D数据集中的3D目标检测任务。训练时的学习率为0.001,momentum为0.9,迭代了3000次,结果如下图所示:
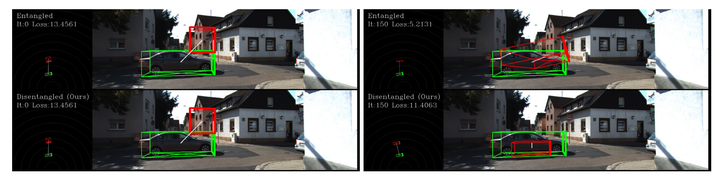
上图中第一行为使用原始的训练得到,第二行为使用
的Disentangling
Loss形式训练得到。左边的图分别是使用两种损失函数训练时初始化后的结果,右图是分别使用两种损失函数迭代150次的结果。上图中绿色部分是ground
truth,红色部分是网络的预测结果,粗线表示车头方向,交叉线表示车的底面。从图中可以看出,初始化相同的条件下,使用了Disentangling
Loss形式的损失函数得到的模型结果在同样的迭代次数下比使用原始的损失函数更接近ground truth。
为便于进一步观察使用Disentangling Loss与否在训练过程中的差异,作者画出来4组参数以及的迭代过程,如下图所示:

上图从左到右依次代表长宽高、表示方向的四元数、3D目标框中心在图像平面上的投影、3D目标框中心的深度、在2种损失函数形式下的迭代过程。图中粉红色代表使用了原始的
,蓝色代表使用了
的Disentangling Loss形式。从图中可以看出,使用了Disentangling Loss形式的损失函数训练模型迭代更快。
3.实验
3.1 实验设置
在进行2D目标检测时,共使用了由5种长宽比、3种尺寸
组合而成15种anchor,其中
是FPN中不同尺度特征的下采样率。若某个anchor与ground truth的IoU大于阈值
,则认为这是一个positive anchor。
在进行3D目标检测时,预定义如下先验:、
、
、
、
。在测试阶段置信度阈值为
。
对于2D检测的损失函数权重设置为1,对于3D检测的损失函数权重设置为0.5。在3D检测的目标框回归损失函数中,设置,在3D检测的置信度损失函数中,设置
。
在训练时使用了水平翻转作为数据增强的唯一方法。使用学习率为0.01的SGD优化方法在4个NVIDIA V-100 GPU上进行训练,batch size设置为96,共迭代了20k次,在第12k次迭代和第16k次迭代时将学习率降低为原来的0.1倍。
3.2 在KITTI3D数据集上测试
实验结果如下表所示:
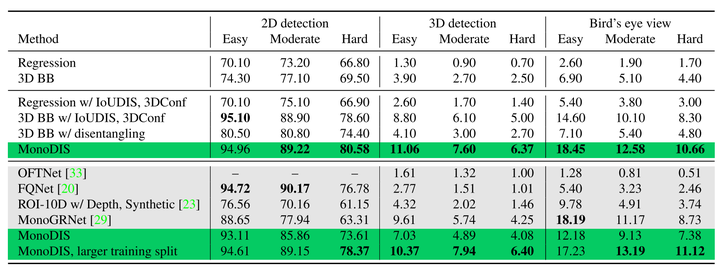
上表中第一行和第二行对比了在训练3D目标检测网络时,直接回归和回归由
解算出的3D
bounding box的性能,显然在训练时回归3D bounding box能提高网络性能。第三、四行表示使用了Signed
IoU、使用Disentangling
Loss形式的2D检测损失和3D检测的置信度,对比第三、四行和第一、二行,使用上述方法能提高网络的性能。使用本文提到的所有技巧训练,测试结果为上表中第五行MonoDIS的结果。上表中的阴影部分为在KITTI3D测试集上的结果。
4.总结
对于2D目标检测,提出了使用Signed IoU的方法构造目标框回归损失函数;对于3D目标检测,使用了在2D检测结果上的条件概率构造损失函数。
提出了Disentangling Loss,将其应用于2D目标检测和3D目标检测的目标框回归损失函数中,简化训练过程,提高网络收敛速度和网络性能。
基于上述方法构建网络,同时进行2D目标检测和3D目标检测,通过实验证明这些方法的有效性。
转载请注明:《使用Disentangling形式的损失函数回归2D和3D目标框》